Robotics researcher and AI engineer with a PhD in multi-robot systems from the University of Southern Denmark. My research focused on decentralized coordination, coverage planning, and UAV swarms in search and rescue (SAR) operations. I now build AI agents, LLM tooling, and developer tools at Colourbox. This blog covers open-source projects spanning autonomous robots, multi-agent systems, and personal hacking.
Decentralized Trajectory Allocation
A python package for decentralized trajectory allocation for multi robot systems.
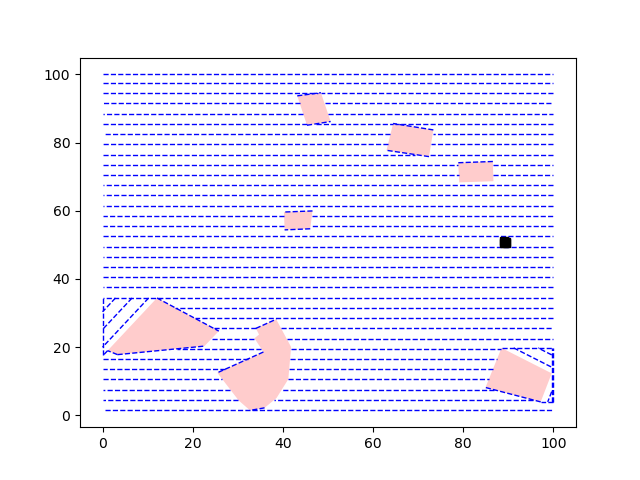
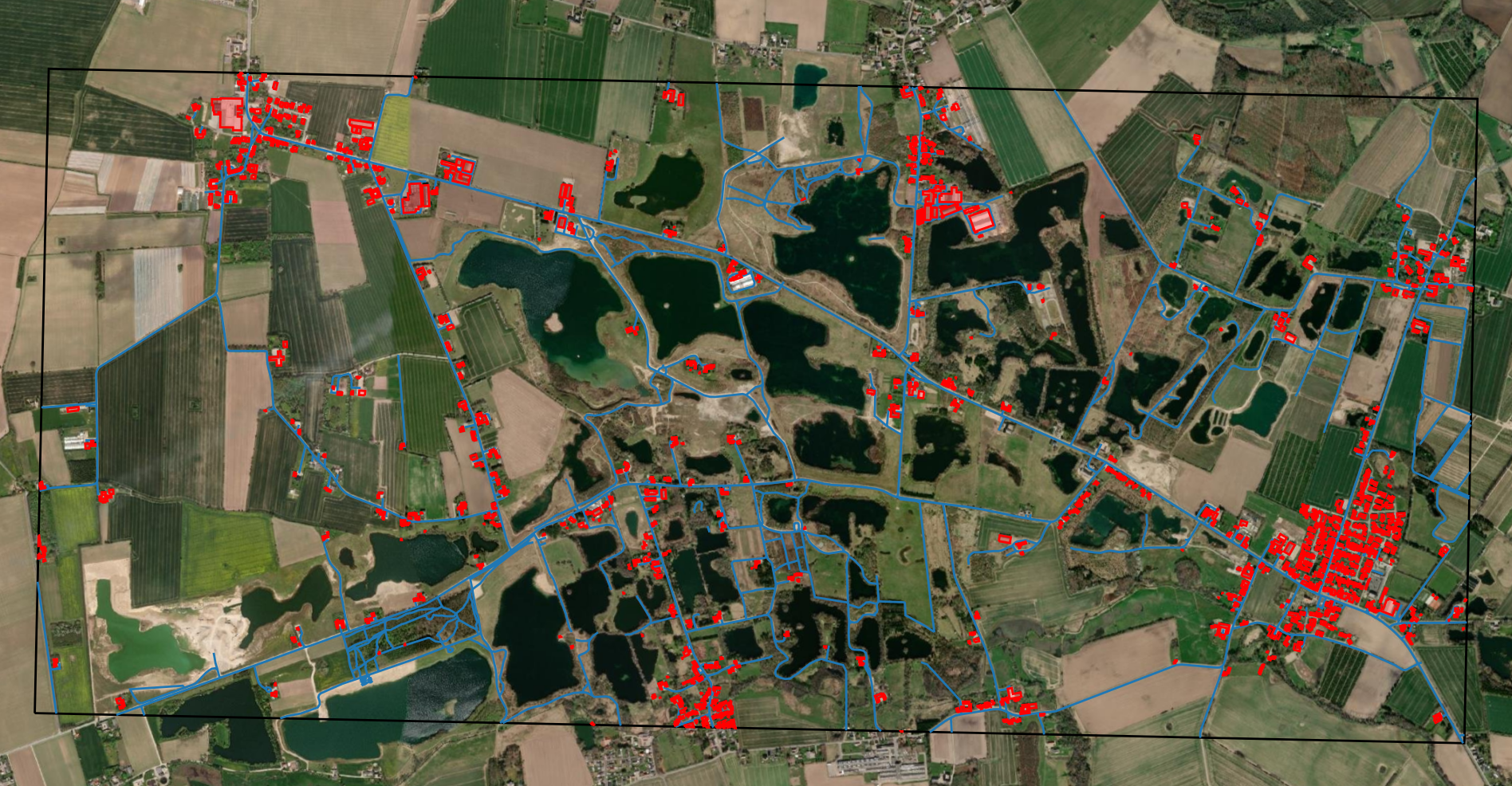
Dynamic Decentralized Informative Coverage
Decentralized informative coverage planning for multi-UAV systems — real-world area coverage with adaptive exploration.
SwarmTalk
Open-source, low-cost UAV-to-UAV communication over ESP-NOW. Published at ICUAS 2025.